

第十三届蓝桥杯嵌入式省赛程序设计详细题解
第十三届蓝桥杯嵌入式省赛题目相对于第十二届较为简单,没有那么多串口的数据处理以及判断!

(图片来源网络,侵删)
第十三届省赛主要是制作一个可由串口设置密码的密码锁。本实验中,我们将用到LED模块、按键模块、串口模块、定时器的PWM模块以及官方会提供源码的LCD模块。
文末有小编写的代码
一、CubeMX配置
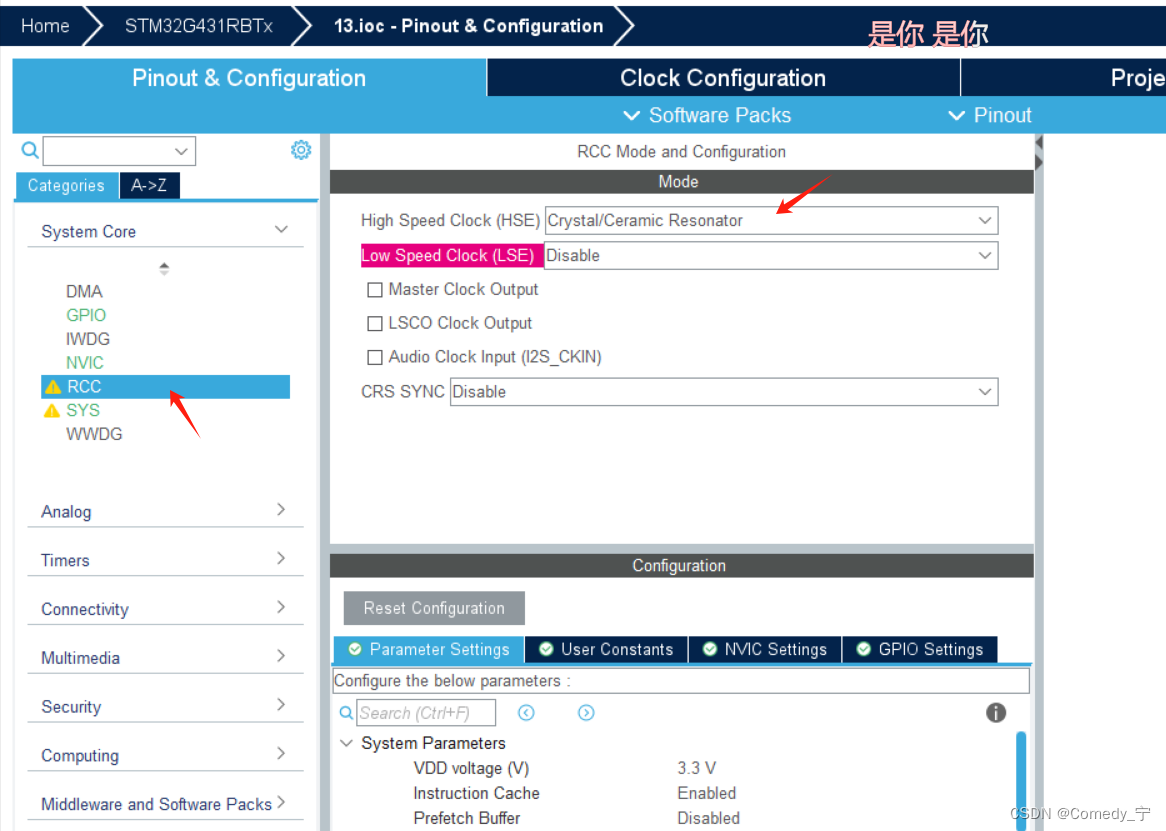
1.使能外部高速时钟:
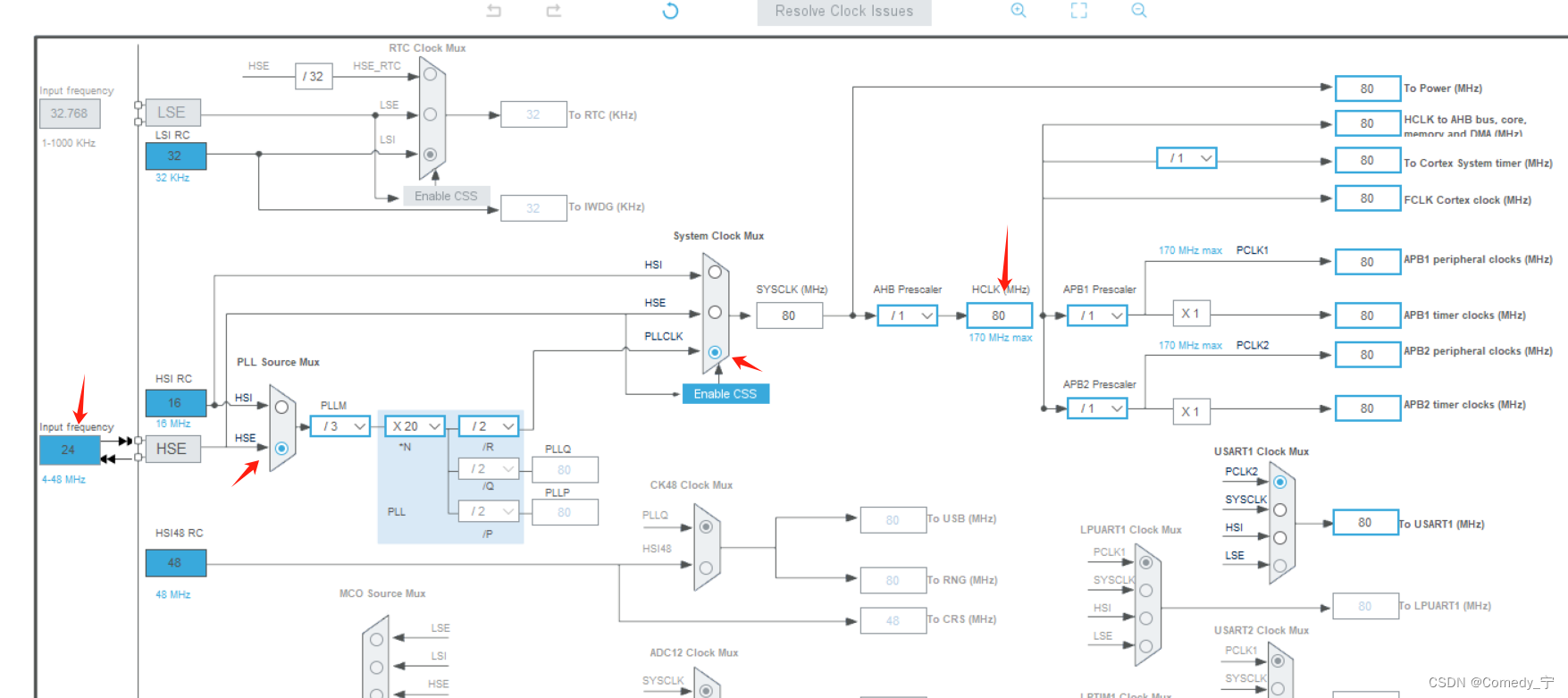
2.配置时钟树:
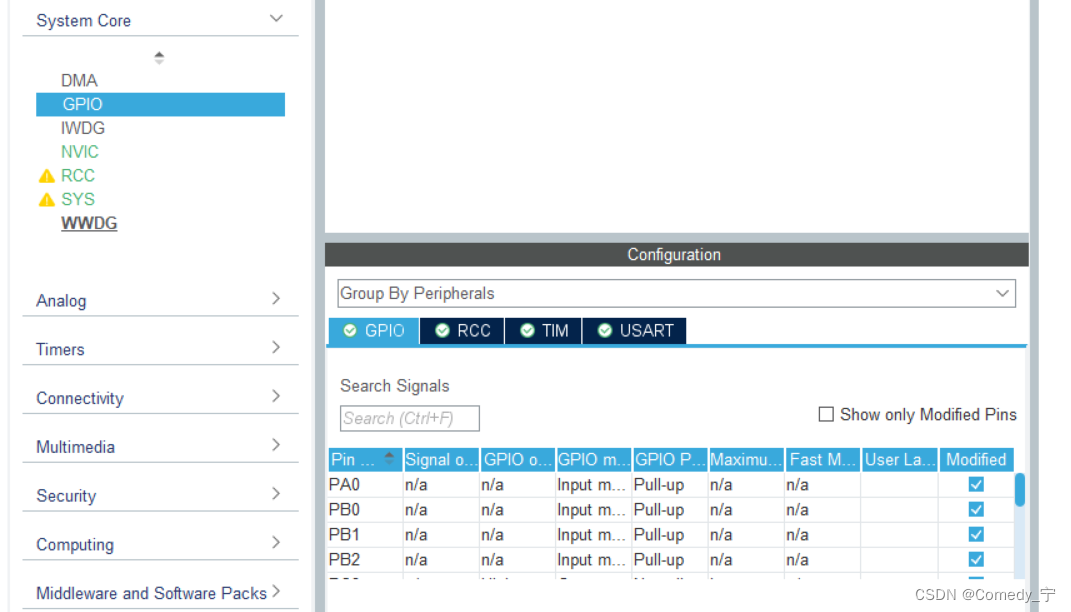
4.GPIO输入
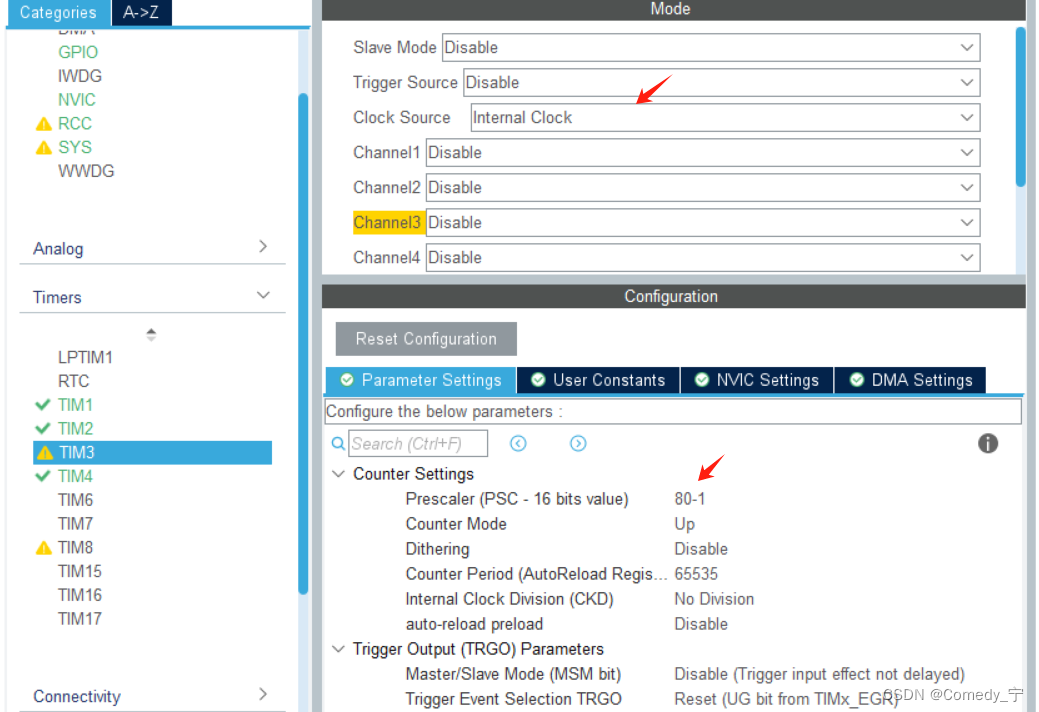
5. TIM定时器
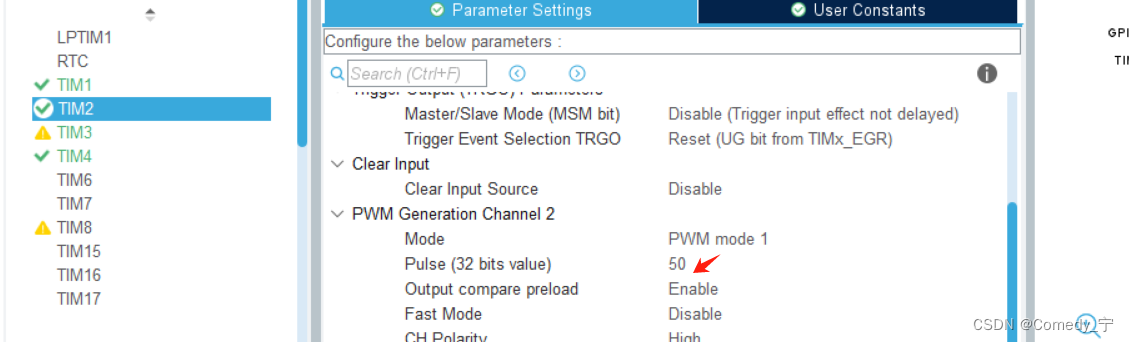
5.1 TIM2输出PWM脉冲
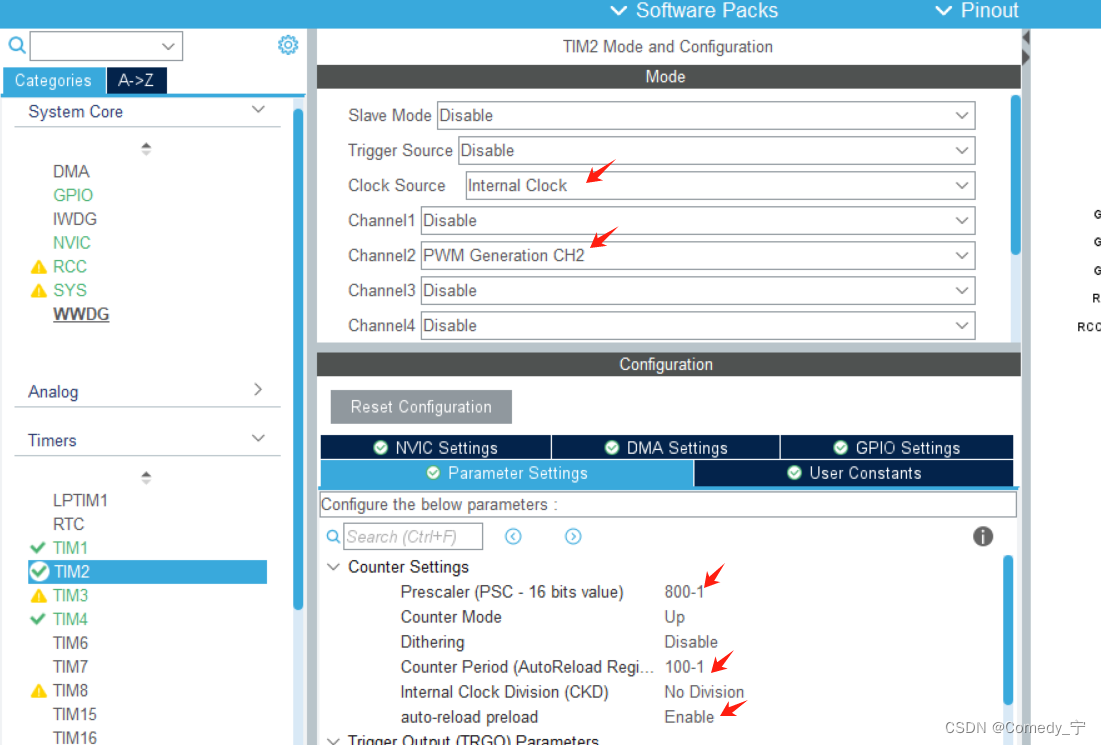
设置默认Pluse为50,即占空比为50%
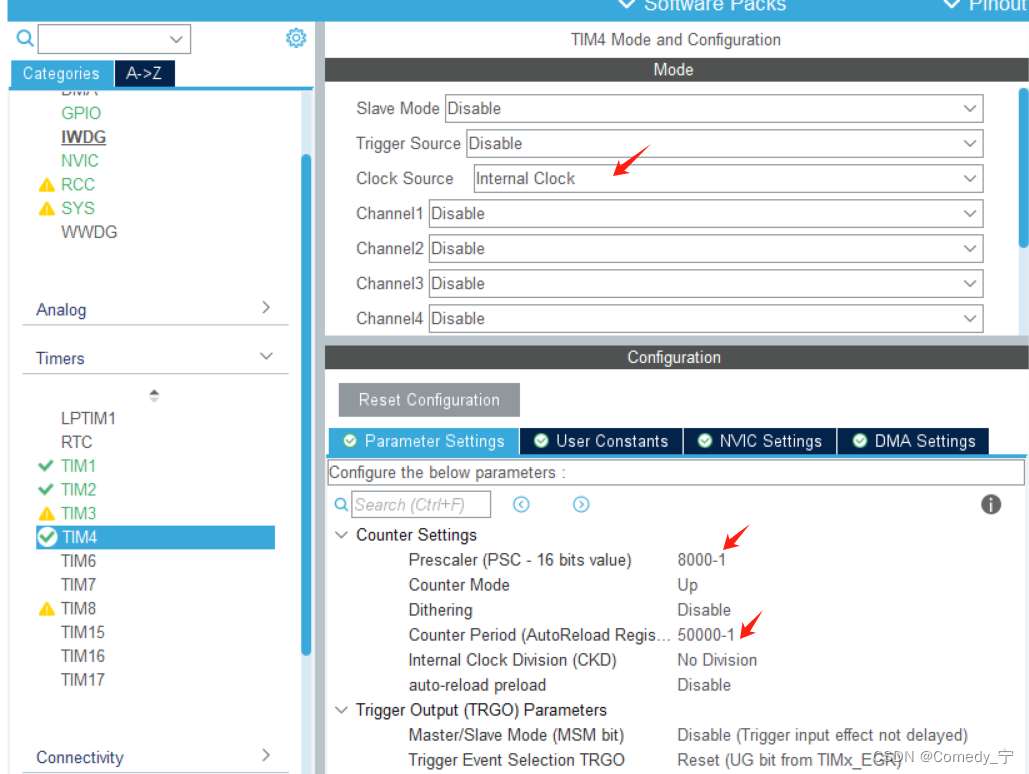
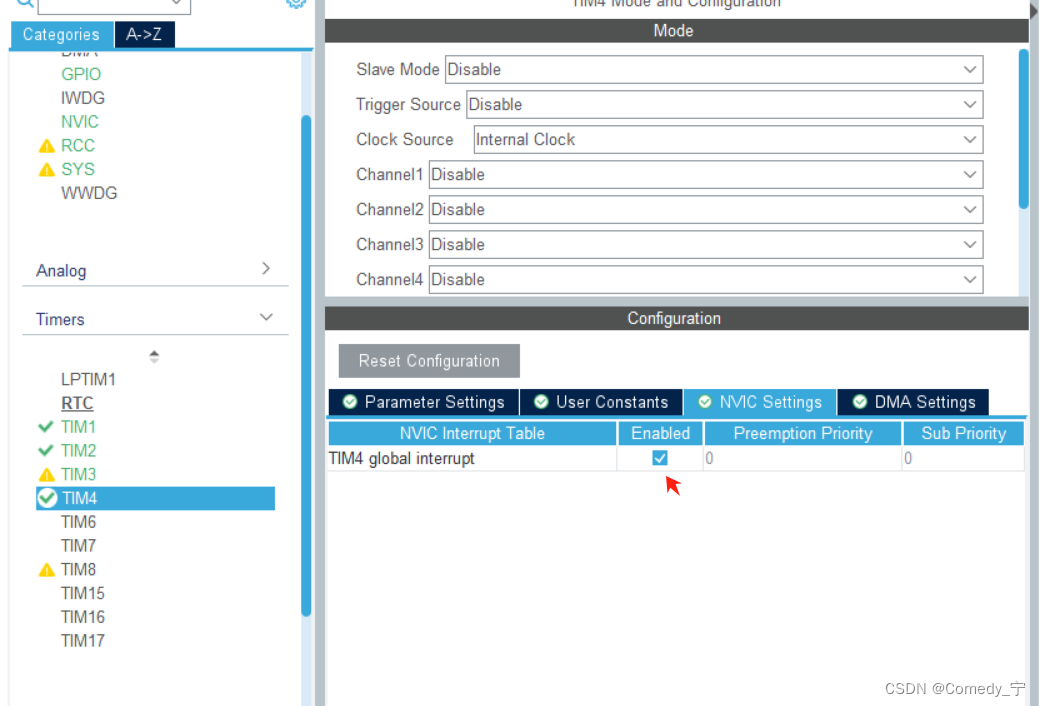
5.2 TIM4实现定时5s
5.3 TIM3定时器实现微妙(us)延迟
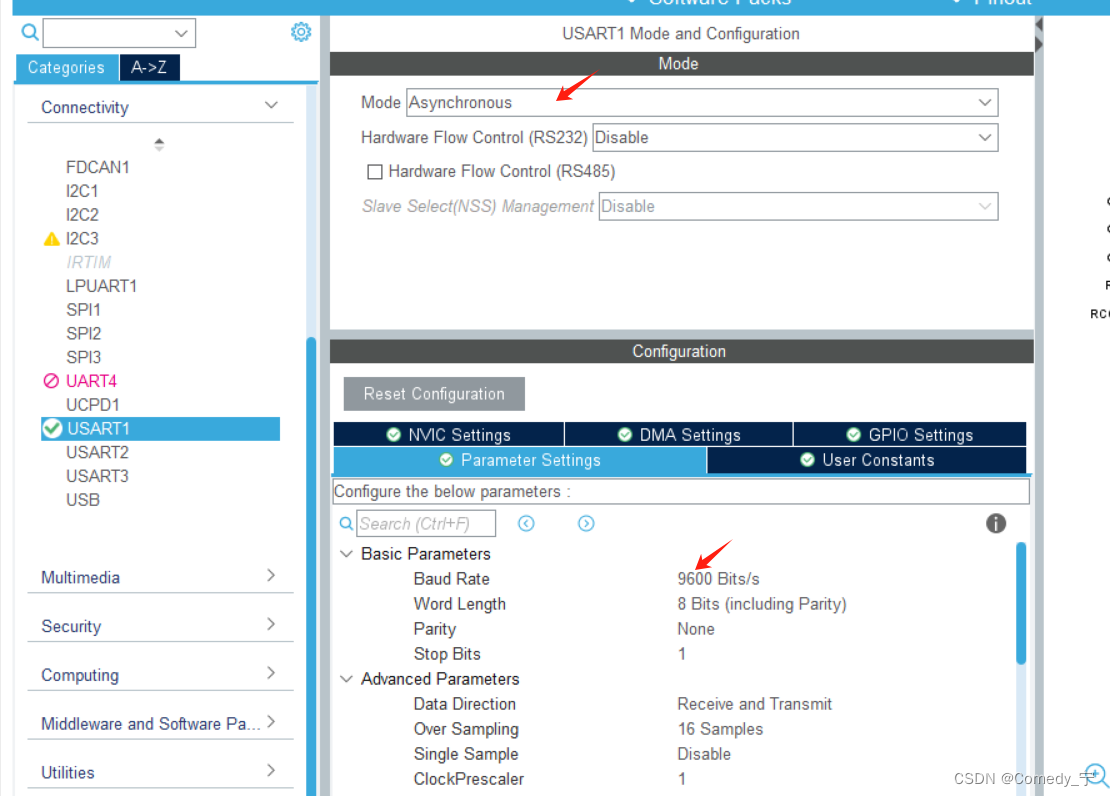
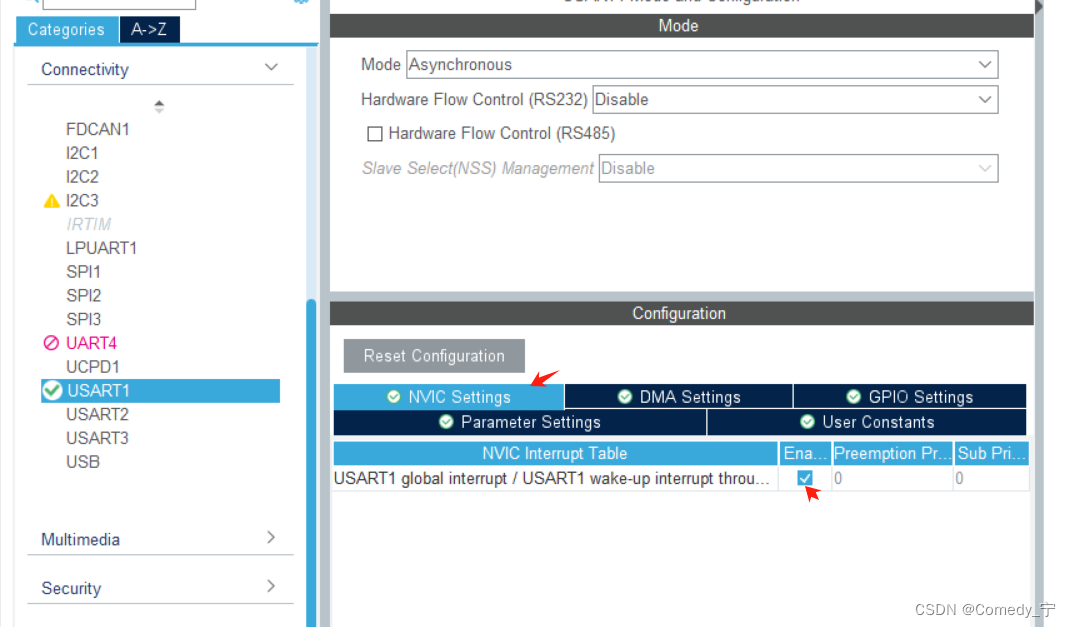
6.USART(通信)
USART串口接收数据,我使用两种方法实现,大家选取其中一种即可!
1.定长接收数据
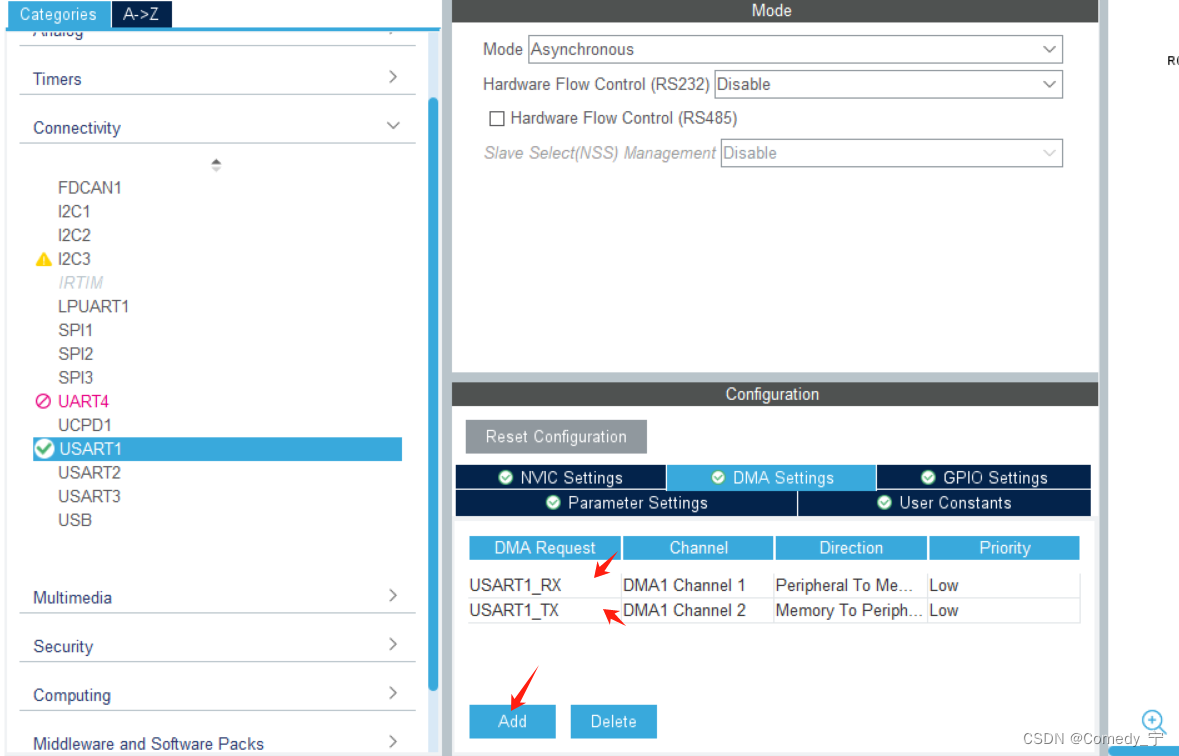
2,不定长接收数据+DMA方式
此种方法的核心是空闲中断!
二、代码实现
2.1 main函数实现
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM2_Init();
MX_USART1_UART_Init();
MX_TIM3_Init();
MX_TIM4_Init();
MX_TIM1_Init();
/* USER CODE BEGIN 2 */
LCD_Init();
LCD_Clear(Black);
LCD_SetBackColor(Black);
LCD_SetTextColor(White);
HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_2);
led(1,0);
led(2,0);
led(3,0);
led(4,0);
led(5,0);
led(6,0);
led(7,0);
led(8,0);
HAL_UART_Receive_IT(&huart1, buff, 7);
HAL_TIM_Base_Start_IT(&htim4);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
Key_handle();
lcd();
if(key4_count>=3&&led_flag==0)
{
led(2,1);
delay_us(50000);
delay_us(50000);
led(2,0);
delay_us(50000);
delay_us(50000);
}
}
/* USER CODE END 3 */
}
2.2 lcd函数实现
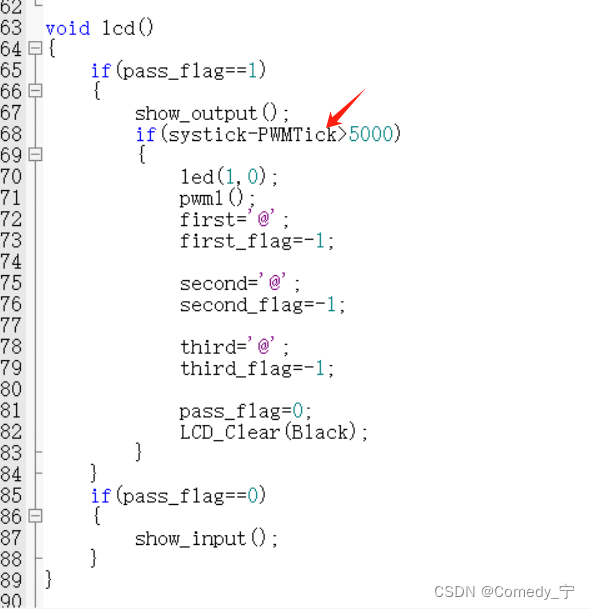
void lcd()
{
if(pass_flag==1)
{
show_output();
if(systick-PWMTick>5000)
{
led(1,0);
pwm1();
first='@';
first_flag=-1;
second='@';
second_flag=-1;
third='@';
third_flag=-1;
pass_flag=0;
LCD_Clear(Black);
}
}
if(pass_flag==0)
{
show_input();
}
}
void show_input()
{
LCD_DisplayStringLine(Line1," PSD ");
sprintf(B1," B1:%c",first);
LCD_DisplayStringLine(Line3,B1);
sprintf(B2," B2:%c",second);
LCD_DisplayStringLine(Line4,B2);
sprintf(B3," B3:%c",third);
LCD_DisplayStringLine(Line5,B3);
}
char pl[50];
char zkb[50];
int c_pl;
int c_ARR;
int c_zkb;
int c_pluse;
void show_output()
{
LCD_DisplayStringLine(Line1," STA ");
c_ARR=__HAL_TIM_GET_AUTORELOAD(&htim2);
c_pl=100000/(c_ARR+1);
sprintf(pl," F:%dHz",c_pl);
LCD_DisplayStringLine(Line3,pl);
c_pluse=__HAL_TIM_GET_COMPARE(&htim2,TIM_CHANNEL_2);
c_zkb=c_pluse*100/(c_ARR+1);
sprintf(zkb," S:%d%%",c_zkb);
LCD_DisplayStringLine(Line4,zkb);
}
2.3 按键扫描功能实现
int Keynum()
{
int key=0;
if(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_0)==0)
{
HAL_Delay(5);
if(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_0)==0)
{
key=1;
LCD_Clear(Black);
}
while(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_0)==0);
}
if(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_1)==0)
{
HAL_Delay(5);
if(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_1)==0)
{
key=2;
LCD_Clear(Black);
}
while(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_1)==0);
}
if(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_2)==0)
{
HAL_Delay(5);
if(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_2)==0)
{
key=3;
LCD_Clear(Black);
}
while(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_2)==0);
}
if(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0)==0)
{
HAL_Delay(5);
if(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0)==0)
{
key=4;
LCD_Clear(Black);
}
while(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0)==0);
}
return key;
}
char first='@';
int first_flag=-1;
char second='@';
int second_flag=-1;
char third='@';
int third_flag=-1;
char pass1='1';
char pass2='2';
char pass3='3';
int pass_flag=0;
int lcd_flag=0;
int ledTick=0;
void Key_handle()
{
int keynum=Keynum();
if(keynum==1)
{
first_flag++;
switch(first_flag%10)
{
case 0:first='0';break;
case 1:first='1';break;
case 2:first='2';break;
case 3:first='3';break;
case 4:first='4';break;
case 5:first='5';break;
case 6:first='6';break;
case 7:first='7';break;
case 8:first='8';break;
case 9:first='9';break;
}
}
if(keynum==2)
{
second_flag++;
switch(second_flag%10)
{
case 0:second='0';break;
case 1:second='1';break;
case 2:second='2';break;
case 3:second='3';break;
case 4:second='4';break;
case 5:second='5';break;
case 6:second='6';break;
case 7:second='7';break;
case 8:second='8';break;
case 9:second='9';break;
}
}
if(keynum==3)
{
third_flag++;
switch(third_flag%10)
{
case 0:third='0';break;
case 1:third='1';break;
case 2:third='2';break;
case 3:third='3';break;
case 4:third='4';break;
case 5:third='5';break;
case 6:third='6';break;
case 7:third='7';break;
case 8:third='8';break;
case 9:third='9';break;
}
}
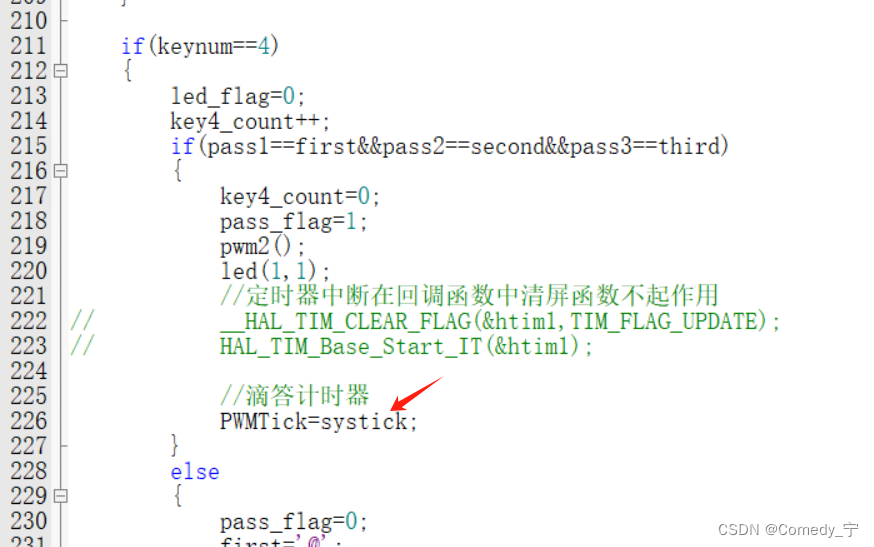
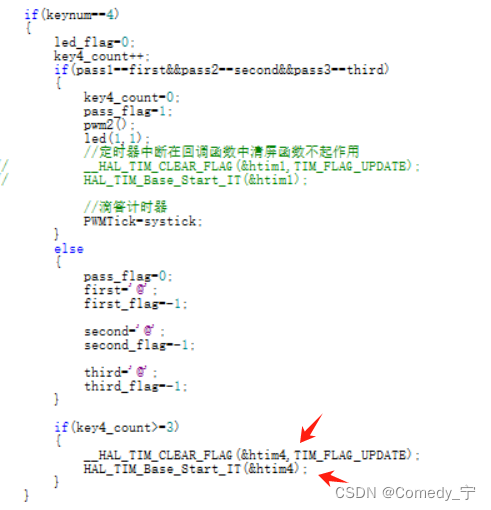
if(keynum==4)
{
led_flag=0;
key4_count++;
if(pass1==first&&pass2==second&&pass3==third)
{
key4_count=0;
pass_flag=1;
pwm2();
led(1,1);
//定时器中断在回调函数中清屏函数不起作用
// __HAL_TIM_CLEAR_FLAG(&htim1,TIM_FLAG_UPDATE);
// HAL_TIM_Base_Start_IT(&htim1);
PWMTick=systick;
}
else
{
pass_flag=0;
first='@';
first_flag=-1;
second='@';
second_flag=-1;
third='@';
third_flag=-1;
}
if(key4_count>=3)
{
__HAL_TIM_CLEAR_FLAG(&htim4,TIM_FLAG_UPDATE);
HAL_TIM_Base_Start_IT(&htim4);
}
}
}
2.4 PWM脉冲转换
void pwm2()
{
__HAL_TIM_SET_AUTORELOAD(&htim2,50-1);
__HAL_TIM_SET_COMPARE(&htim2,TIM_CHANNEL_2,5);
}
//方波
void pwm1()
{
__HAL_TIM_SET_AUTORELOAD(&htim2,100-1);
__HAL_TIM_SET_COMPARE(&htim2,TIM_CHANNEL_2,50);
}
2.5 某种状态持续5s的两种操作方法
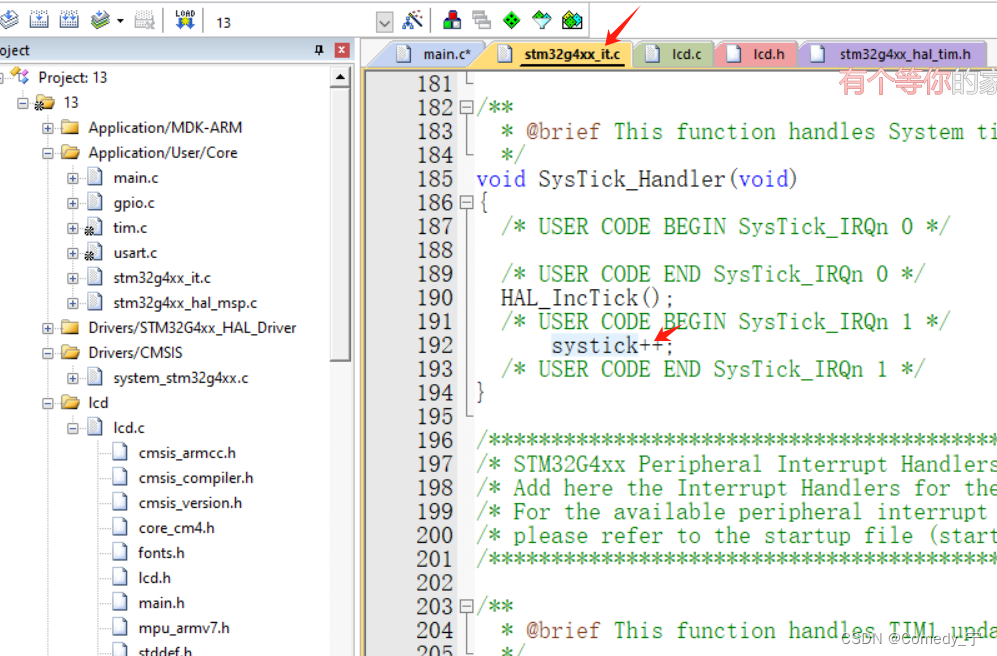
1.利用系统滴答计时器
本实验中 实现输出2KHz 10%占空比的脉冲信号,持续5秒钟,切换为 1KHz 方波信号输出的功能 使用的是系统滴答计时器。
2.TIM定时器定时5s
本实验中实现 指示灯 LD2 以 0.1秒为间隔亮、灭闪烁报警,5 秒后熄灭的功能使用的是TIM4定时器定时5s。
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance==TIM4)
{
led_flag=1;
HAL_TIM_Base_Stop_IT(&htim4);
}
}
2.6 延迟100ms
delay_us函数实现定时微妙(us)
void delay_us(int delay)
{
HAL_TIM_Base_Start(&htim3); // 启动定时器
__HAL_TIM_SET_COUNTER(&htim3, 0); // 重置计数器
while (__HAL_TIM_GET_COUNTER(&htim3)
delay_us(50000)代表延迟50000us即50ms,但因为定时器最大计数值为65535,如果delay_us(100000)就超过了定时器最大计数值,所以可以采取delay_us(50000)两次来实现100ms定时!
2.7 USART串口与修改密码
USART串口接收数据,我使用两种方法实现,大家选取其中一种即可!
1.接收固定长度数据
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(buff[0]==pass1&&buff[1]==pass2&&buff[2]&&buff[3]=='-'&&judge()==1)
{
pass1=buff[4];
pass2=buff[5];
pass3=buff[6];
HAL_UART_Transmit(&huart1,(unsigned char *)"Success\r\n", 9, 50);
}
else
{
HAL_UART_Transmit(&huart1,(unsigned char *)"error\r\n", 7, 50);
}
HAL_UART_Receive_IT(&huart1, buff, 7);
}
int judge()
{
for(int i=0;i
if((buff[i]
return 1;
}
}
}
文章版权声明:除非注明,否则均为主机测评原创文章,转载或复制请以超链接形式并注明出处。
")

")
")
还没有评论,来说两句吧...